近日,在英国伦敦举行的机器人与自动化国际会议(IEEE International Conference on Robotics and Automation,英文简称 ICRA)上,我院控制与仿真中心机电伺服与制导控制课题组硕士研究生高俊杰在姚郁教授、贺风华教授指导下发表的研究论文《基于凸多面体表达的障碍物感知拓扑的旋翼无人机规划》(Obstacle-Aware Topological Planning over Polyhedral Representation for Quadrotors)荣获大会“杰出规划论文奖”(Outstanding Planning Paper Award)提名。该论文提出了基于多面体表达的障碍物感知拓扑路径规划方法,能够有效解决无人机在障碍物环境下自主安全飞行的路径规划和轨迹生成问题。
该研究将地图的表达与规划方法紧密耦合在一起,提出了一个多面体障碍物感知地图表达与规划的新框架,地图表达方法可以更极致地为运动规划提供感知信息,并通过拓扑运动规划方法生成具有最大障碍间隙的光滑轨迹。与现有方法相比,该方法具有更高的计算效率、更短的轨迹长度和更高的成功率,为未知环境下智能无人系统的在线自主运动规划提供了实际可行的解决方案。
哈工大为该论文唯一通讯单位。高俊杰为论文第一作者,贺风华为论文通讯作者,张蔚和姚郁为论文共同作者,其中张蔚参与此项研究工作时为本科生。
机电伺服与制导控制课题组在负责人马杰教授的带领下,积极为学生开展科技创新、参加国内外高水平竞赛创造条件,团队学生获得多项国际比赛一等奖。开展此项研究的无人机平台为课题组学生自主研发,算法验证实验在电子厂楼学生创新实习实践基地完成。
机器人与自动化国际会议由电气和电子工程师协会(IEEE)主办,是IEEE机器人与自动化学会(IEEE Robotics and Automation Society)会议之一。本年度会议共收到投稿论文3125篇,6000余人参加会议,会议设有各类奖项共15项,其中评选出“杰出规划论文奖”提名论文仅3篇。

高俊杰在会议现场
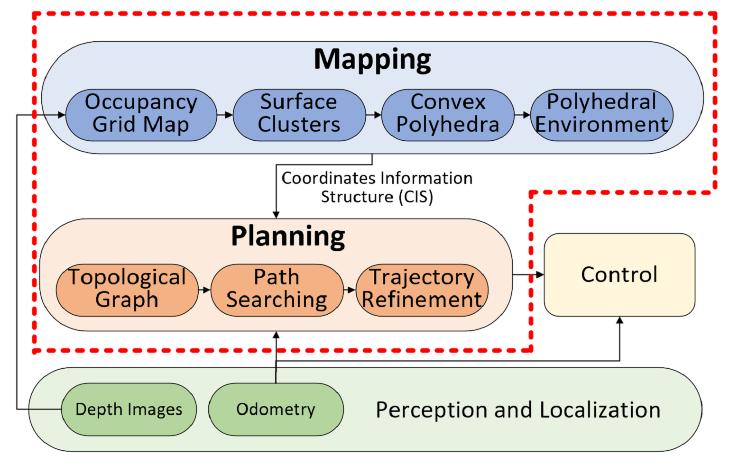
多面体障碍物感知地图表达与规划框架
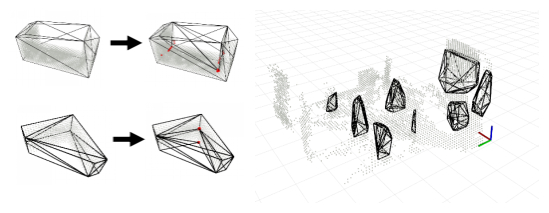
基于多面体的障碍物感知
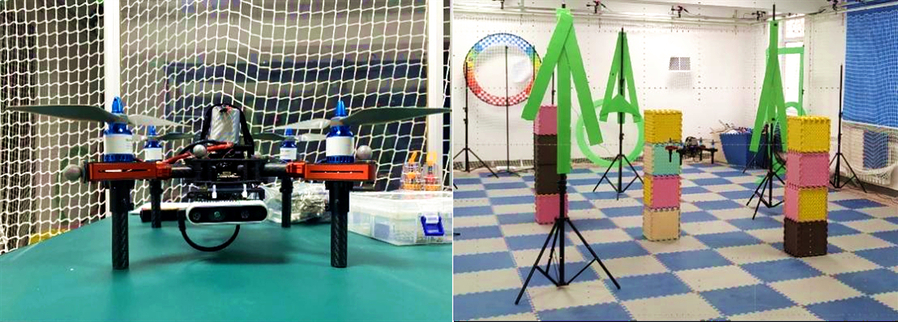
自研的无人机平台及实验场景