2020年,哈尔滨工业大学《捷联惯导虚拟仿真实验教学项目》获得首批国家级虚拟仿真实验教学一流课程认定。该课程因推动实验教学课程体系化建设成效显著,被评为“虚拟仿真实验教学创新联盟2022年度实验教学应用示范课程”。
一、课程内容简介
《捷联惯导虚拟仿真实验教学项目》由哈尔滨工业大学飞行器控制国家级实验教学示范中心自主研发,是“飞行器拦截的探测、制导与控制技术”虚拟仿真实验平台上开展的系列实验之一,属于《导航原理》课程,面向自动化专业和探测制导与控制技术相关专业的学生。
本实验针对实物实验的高成本、高风险、大区域、难以在实验室环境中复现实际环境中空气动力、重力梯度变化等缩比模型相关的挑战,解决学生做不了、做不好的问题。针对拦截弹从发射到摧毁目标(或拦截失败)的飞行过程,建立三维虚拟环境对捷联惯性导航的各种航姿算法进行可视化仿真和性能比较、分析,进而对导航解算的配置策略进行优化,使得拦截弹以尽可能小的脱靶量击中目标。导航与制导的紧密结合是本项目的特色之一,它旨在帮助学生全面掌握相关知识,培养创新能力。项目鲜明地体现出“两性一度”的特色:
高阶性:在导航应用中捷联惯导系统的性能受到多方面制约,克服各种影响和提高导航精度是一个复杂的工程问题。学生需要在对比和分析的基础上,从多个方面对捷联惯导系统的解算策略进行优化,提升导航精度。
创新性:在旋转矢量算法、毕卡解实现和重力修正等实验环节,除了已经给出的算法选项外,学生还可以自主设计算法和实现方法,与已有选项进行对比,进一步优化仿真结果。
挑战度:实验内容包含捷联惯导系统研究的热点问题,如高动态条件下的姿态算法评估。并将专业老师在捷联惯导系统方面的最新研究成果纳入了姿态解算实验环节中,实验具有难度。
二、课程建设特色与创新点
1. 面向工程,引入最新科研成果,增强科教融合
本实验是国防科学技术进步奖《xxx一体化建模仿真***平台研究与应用》项目在教学中的转化。“捷联惯导虚拟仿真实验”以对入侵飞行器的拦截为背景,整个任务基于假想的敌方飞行器入侵、我方预警卫星探测和导弹拦截过程,针对航天与国防方向的飞行器类课程群,开展目标探测、目标运动估计和意图识别、飞行器导航解算、飞行器制导与控制等方面的虚拟仿真实验,开发一个综合的三维虚拟仿真场景,其示意图如图1所示。

图1. 基于目标拦截的三维虚拟仿真场景示意图
2. 以点带面,完善系列实验
在规划和建设阶段就着眼于带动学科相关课程的实验教学体系化建设,以建立一个完整的、涵盖多门相关课程的实验体系。“捷联惯导虚拟仿真实验”作为其中先期建设的实验项目,发挥了良好的引领示范作用,其在开发技术、共享机制、教学实验、应用推广等方面积累的经验可以有力推动学科其它相关课程的实验教学的体系化建设。目前规划的实验体系及其与综合虚拟仿真场景主要要素之间的关系如图2所示。

图2. 基于综合虚拟仿真场景的实验体系
(1)捷联惯导虚拟仿真实验。拦截弹飞行过程中的转动和加速度可以分别通过在弹体上安装的陀螺仪和加速度计测得。然后利用适当的姿态和速度、位置求解算法,在弹上的导航计算机中通过迭代递推的方式计算拦截弹当前时刻的位姿信息。这其中,对陀螺仪和加速度计的测量误差如何进行补偿,对航姿求解算法如何进行选取,对重力加速度等环境参量如何根据拦截弹的当前位置进行修正,在设计实际的捷联惯导系统时都是必须要考虑的问题。本实验针对这些问题,分别设计了相应的实验环节,如旋转矢量算法比较环节、毕卡解实现方法对比环节、重力加速度修正算法对比环节、以及惯性仪表误差补偿策略比较环节,如图3所示。所示让学生针对每一个问题,借助虚拟仿真过程,对不同的策略或算法进行比较、优化,使得捷联惯导系统求解得到的拦截弹位姿信息尽量接近其真实(模拟得到)的位姿信息,以便为后续的制导和飞行控制奠定可靠的基础。
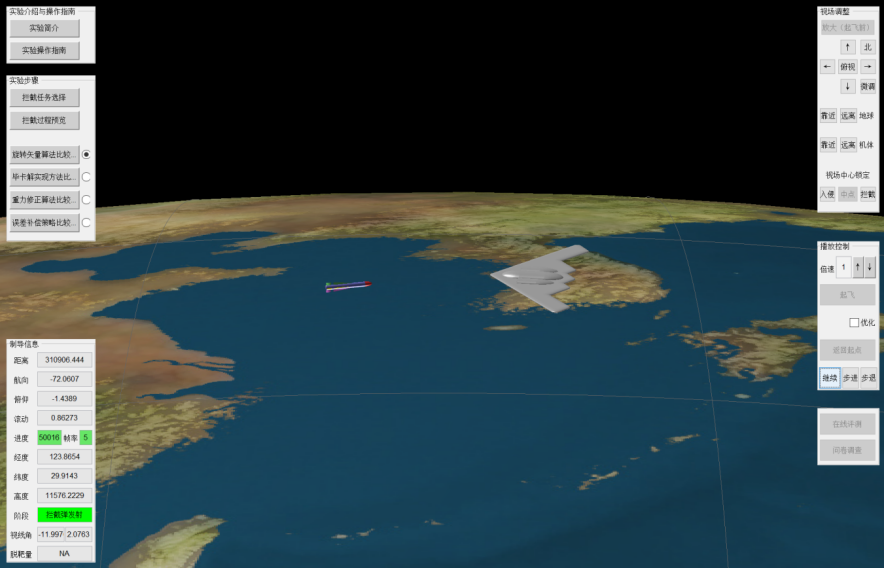
图3. 捷联惯导虚拟仿真实验界面
(2)目标探测虚拟仿真实验。在敌方飞行器起飞后,我方的天基、空基或地基预警系统如何快速地探测到入侵目标,对其进行准确的识别,对其飞行轨迹和意图进行有效的预测和研判,是目标探测类课程中要探讨的重要问题。“捷联惯导虚拟仿真实验”中所用到的入侵飞行器拦截的虚拟仿真三维场景,同样可以为“目标探测与识别实验”提供环境和数据支撑。利用假想的入侵飞行器的飞行数据、探测装置(比如预警卫星)的当前位置及探测范围,并考虑到测量噪声和误差,可以建立相应的观测方程。通过对入侵飞行器的位置、速度、飞行方向等信息进行提取,分析其轨道和轨迹特征,提供给防御决策中心,以便后者及时对目标的意图进行识别,做出相应的防御决策。通过共享基于飞行器拦截背景的场景和数据,可以开展探测方案对比(如天基、地基、空基的不同选择或组合)、目标运动参数提取算法对比(比如滤波融合或神经网络)、目标飞行意图识别等方面的相关实验,无需另外再开发全新的三维实验场景和模拟数据生成系统。在学生做实验过程中,可以启用相同的后台机制对学生的实验操作步骤、实验结果和在线测试结果进行全面的跟踪、记录,以便对学生的实验质量进行综合评分。
(3)拦截弹制导虚拟仿真实验。在已经知道目标的当前位置、速度和飞行方向等运动信息和拦截弹自身的当前位置、速度和飞行方向等运动信息的情况下,拦截弹接下来要以多快的速度、沿着什么样的轨迹飞行,以便实现对目标的有效拦截,是拦截弹上的制导计算机要解决的问题。比如,从制导类型层面,面临着自主控制、自动寻敌还是遥控制导的选择;而对于特定的制导类型,比如自寻的制导,又面临着不同制导算法的选择,如追踪法、平行接近法和比例导引法。针对这类问题,可以设计拦截弹的制导策略优化对比虚拟仿真实验。前面的提到的基于入侵飞行器拦截背景的三维虚拟场景,同样可以为拦截弹的指导策略优化对比虚拟仿真实验提供有效的支撑。
(4)拦截弹飞行控制虚拟仿真实验。在已经知道拦截弹自身当前的位置、姿态和速度信息的情况下,根据制导计算机给出的期望位置和速度指令,如何调节、控制弹体上的执行机构(如舵机、推进器等),使得拦截弹在规定的时间内通过适当的姿态和位置机动,以满足要求的精度实现期望的位置和速度。这其中涉及执行机构的配置、控制律的选取。通过本实验,学生可以对不同的执行机构配置方案(如舵机的数量和位置)、不同的飞行控制律(如鲁棒控制、变结构控制等)进行设计和比较,并利用综合三维虚拟仿真场景下的仿真,直观地观察各种控制方案的效果。
三、课程应用成效
《捷联惯导虚拟仿真实验教学项目》自2019年秋季在实验空间平台上线以后,尤其是在2020年新冠疫情时期,线下实验无法正常开展的情况下,本实验教学项目在在线教学中发挥了重要的作用。通过统计,该实验访问人次已经达到1万余人次,实验通过率92%。此后,将进一步开放平台中相关三维可视化、导航、制导控制等相关实验模块,带动相关学科的快速发展,组织跨学校学生团队共同完成飞行器虚拟仿真实验。在后续改进的实验方案中还将引入更多的工程问题和科研新成果,纳入近些年逐渐兴起的旋转调制捷联惯导系统,并将实验系统移植到WEB环境下,以便使更多的用户能够更加便捷地访问。
通过共享本实验教学项目开发的综合虚拟仿真环境及其内核技术,实验体系中其它相关实验项目也在顺利地建设。其中与“拦截弹制导虚拟仿真实验”模块对应的《高超声速飞行器拦截控制虚拟仿真实验教学项目》已经在黑龙江省通过省级认定。
课程负责人简介及课程主要团队成员
课程负责人:沈毅,现为哈尔滨工业大学副校长,教授,主要研究方向为飞行器的导航与制导与探测技术。
课程团队主要成员:付振宪、姜宇、钱玉恒、周乃新、李丹丹